Mechanically morphing polymer systems
Functional materials enable organisms to accomplish complex tasks in response to external or self-modulated stimuli with many examples of continuing function beyond the organism’s lifetime. The resurrecting rose of Jericho (Anastatica hierochuntica) and the seed dispersion mechanism of conifer cones are two of the most well-known instances of post mortem tissue functioning in response to environmental changes. While variations in relative humidity and exposure to water are two of the most prevalent stimuli in nature, synthetic functional polymers frequently respond to temperature change, which can be controlled through irradiation with light, oscillating magnetic fields or electrically via Joule heating. These materials are important components of soft actuators used in complex soft robotic systems. For example, a thermally controlled bilayer bending actuator depends on anisotropic thermal expansion of the two joined layers, resulting in a bending or flattening motion. Semicrystalline polymers such as polyethylene exhibit considerable thermal expansion associated with the melt transition, which however cannot be readily used in bilayer bending actuators since melting would compromise the device’s mechanical integrity. To avoid this, we developed segmented polyurethanes with a crystalline soft segment and a physically cross‑linking hard segment that prevents flow beyond the melt transition of the soft segment.1,2 These polymers enabled the development of electro‑thermally controlled bilayer bending actuators with a high deflection and low switching temperature (55°C). To demonstrate the merit of these devices, we designed a cross‑shaped robot with four individually controlled legs capable of performing complex tasks such as locomotion.
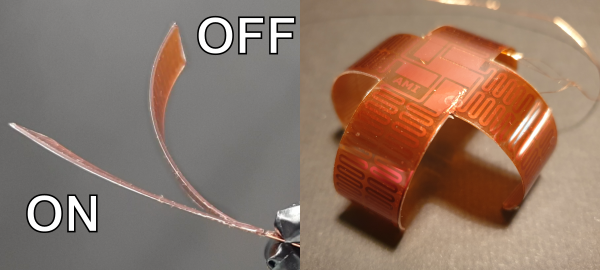
Photo overlay of a high thermal expansion polyurethane and polyimide bilayer bending actuator with integrated Joule heater in the flat (ON) and bent (OFF) state (left). Image of a cross‑shaped soft robot in the resting state (right).
[2] Livius F. Muff, Christoph Weder, manuscript in preparation.